Car and Driver has a column on the next wave of driver assist technologies. This stuff started with traction control, but eventually started taking more of an active role with Mercedes’ introduction of its Distronic branded laser cruise control (where your cruise control maintains not only a constant speed, but a constaint distance between you and the car in front of you) but has evolved to some really amazing stuff. Most are safety-oriented (lane keep assist, emergency braking, etc.) but some are pure convenience (automatic parking.) This kind of tech isn’t reserved for high-end luxury cars (though that’s where it tends to show up first, for obvious reasons.) You can get a full load of driver assistance technologies in tech-centric cars like the Toyota Prius.
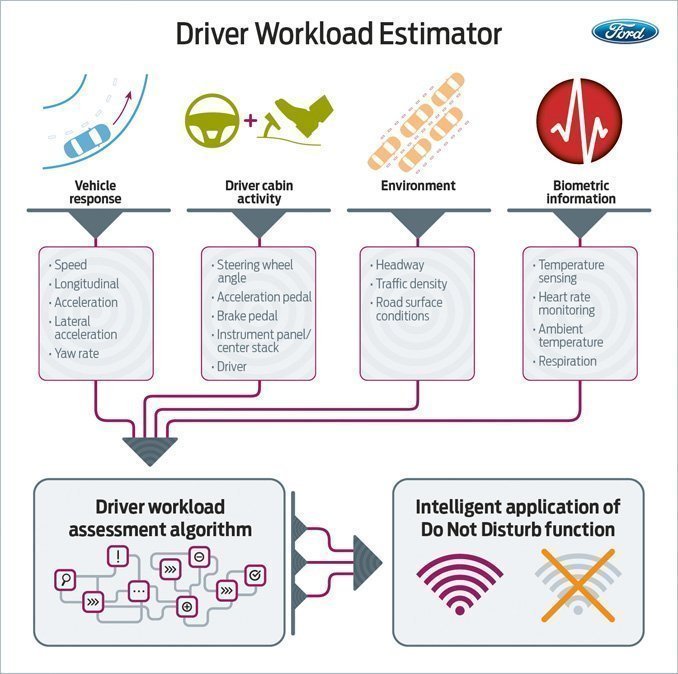
Ford’s Driver Workload Estimator, image credit Ford Motor Company
The next phase, according to C&D, is about gauging the level of cognitive load required by the driver so that telematics systems can calibrate accordingly. For example, changing the radio station might be perfectly OK when you’re chugging along on the interstate with minimal traffic, but that same action could cause an accident in heavy traffic or when navigating a twisty road. An interesting idea, and one that becomes increasingly important as the infotainment systems in our cars evolve to support more and more functionality.
If you consider a car with laser cruise control and lane keep assist, then by all practical measures, the car is capable of driving itself when you’re on a highway. If you add Ford’s proposed driver workload estimator to the mix, the car could theoretically be smart enough to know when it can kick into full auto mode. Now take it a step further– consider the computer visioning technology required for lane keep assist and combine it with the navigation system– the car could certainly follow exits, etc. so that on some routes it could be largely autonomous without signifigant improvements in current technology. It’s just a matter of applying the tech we’ve already got, combined in new ways, and simplifying the problem space by restricting full auto mode to certain classes of routes, roads, and traffic conditions. “Excuse me, sir… we’re about to leave the interstate… I’m afraid you’ll have to take it from here.”
Google’s fully driverless car technology– which can navigate essentially any type of road, is likely decades away… but what I’m proposing could be done much sooner. The primary blockers are driver trust and litigation.
There’s a huge segment of the population who will never trust this type of technology. Fine, they can keep driving themselves, and they will be dead eventually. (Sorry, but it’s true– the acceptance of technology is often a factor of die-off.) However, for early adopters, we would need to see the technology working well for a while– have a positive long-term experience with it– before we’d trust our car to drive itself. Things like laser cruise control and lane keep assist are paving the way for this. Litigation, however, is the main reason this is moving so slowly. The first accident– regardless of whether it’s really the car’s fault– will certainly result in a huge lawsuit, and companies are understandably reluctant to exppose themselves like this. Even though a well-designed driverless car will likely be considerably safer than human drivers, until this technology has been mainstream for a decade or more, consumers and judges alike will almost certainly assume that the computer is at fault.
This is an area that is interesting to me because I’m fascinated by the development of technology in general, and especially in the automotive space. However, it’s more than that. I want to know where my damn flying car is.
I’m not be faceteous– I assert that the flying car, promised to us by science fiction for decades, is impossible from a practical perspective until one key hurdle is crossed. Assuming all the simple-but-expensive problems like high levels of redundancy, production costs, etc. are solved, there’s one seemingly intractable problem, and it exists between the steering wheel and the driver’s seat. We can’t let people “drive” flying cars. I want a flying car in my lifetime, and if my estimates are correct, that requires cars that can drive themselves within the next 10-15 years, and fully driverless roads (similar conceptually to toll roads today) within the next 20-25 years. Only then can we start playing with flying cars. (Note that I’m talking about flying cars, as distinct from personal aircraft– mainly a licensing and availability/price distinction.)
Fun to speculate. Here’s hoping!